Smartgloves II
Reference frames
Section titled “Reference frames”The reference frames are defined such that when the glove is lying flat, all coordinate axes are aligned.

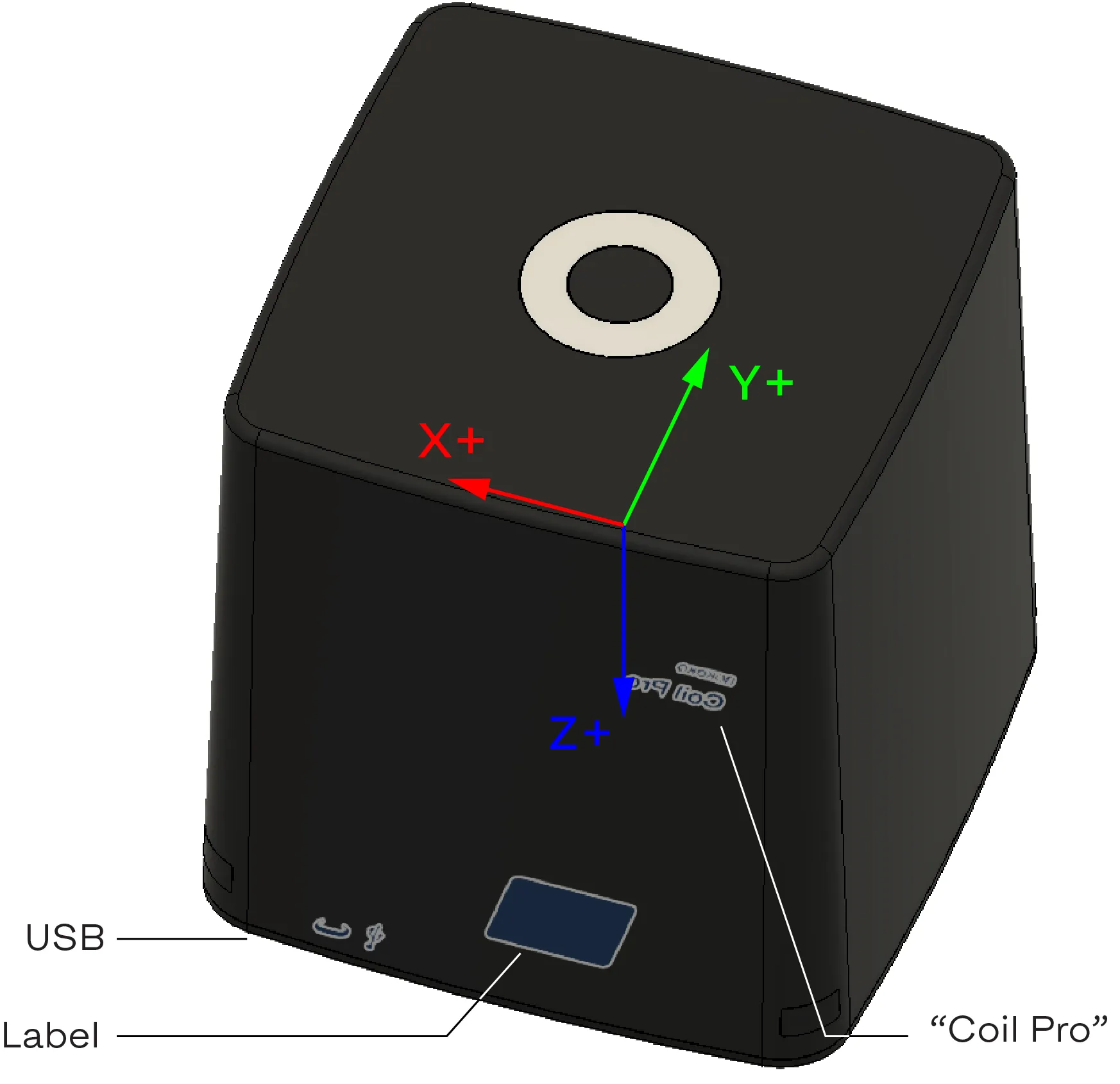
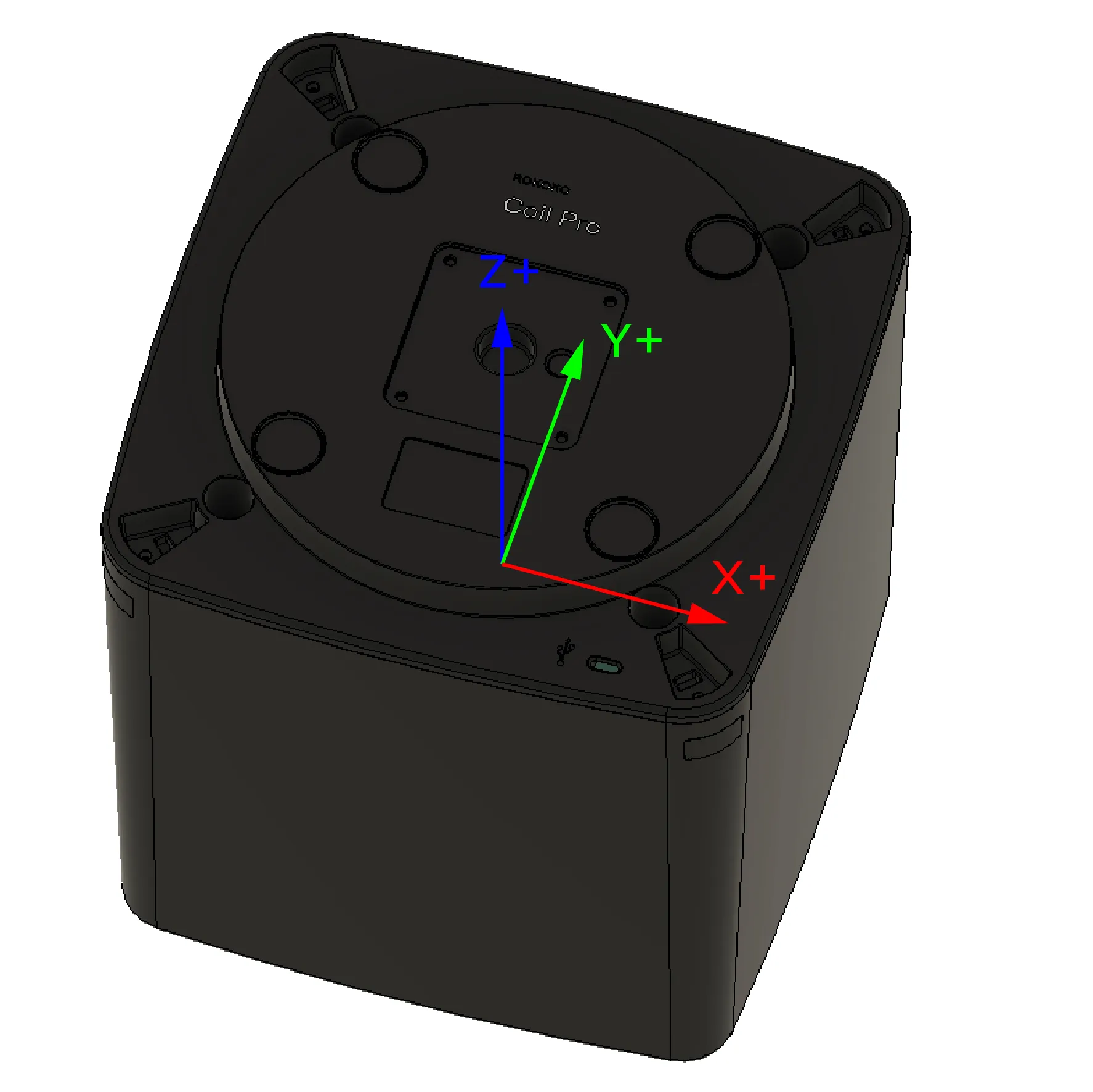
The Coil Pro reference frames are defined in the images below. Note, the direction of the positive X/Y axes are ambiguous in the tracking data; the two possibilities differ by a 180 degree rotation around the Z-axis.
The table below lists all reference frames used in the Smartgloves II data streams.
| Frame Name | Description |
|---|---|
hub | The central frame of the Smartgloves II, centered at the circular Rokoko logo. |
thumb_finger_sensor | The frame of the sensor located on the thumb. |
index_finger_sensor | The frame of the sensor located on the index finger. |
middle_finger_sensor | The frame of the sensor located on the middle finger. |
ring_finger_sensor | The frame of the sensor located on the ring finger. |
little_finger_sensor | The frame of the sensor located on the little finger. |
arm_sensor | The frame of the sensor located on the forearm, near the wrist. |
coil_pro | The frame located at the center of the Coil Pro. |
Status flags
Section titled “Status flags”The Smartgloves II data streams include status flags that indicate the tracking status of each sensor. The meaning of each flag is elaborated in the table below.
| Flag Name | Description |
|---|---|
is_magnetometer_saturated | Whether at least one axis of the magnetometer is saturated. |
is_accelerometer_saturated | Whether at least one axis of the accelerometer is saturated. |
is_gyroscope_saturated | Whether at least one axis of the gyroscope is saturated. |
is_emf_saturated | Whether at least one axis of the electromagnetic field sensor (EMF) is saturated. |
not_is_accelerometer_used | Whether the accelerometer is not being used in the sensor fusion. |
not_is_magnetometer_used | Whether the magnetometer is not being used in the sensor fusion. |
is_coil_pro_present | For Coil Pro tracking. Indicates whether the Coil Pro has been detected. When this is false, the given pose relative to the Coil Pro is not reliable. |
emf_flip_decided | For Coil Pro tracking. Indicates whether the system has decided on the ambiguity in EMF initialization |
is_heading_reliable | For the provided hub orientation, which is relative to the local tangent plane (LTP). Indicates whether the heading (yaw) component of the orientation is reliable. This is false when the system has not yet converged on the heading estimate. |